ROS核心概念及其在生物科技研發(fā)中的應(yīng)用
ROS(Robot Operating System)是一個(gè)靈活且強(qiáng)大的機(jī)器人軟件開發(fā)框架,廣泛應(yīng)用于機(jī)器人系統(tǒng)構(gòu)建。其核心概念包括節(jié)點(diǎn)、節(jié)點(diǎn)管理器、話題、消息、服務(wù)、參數(shù)和功能包等,這些概念為機(jī)器人系統(tǒng)提供了模塊化和分布式的開發(fā)方式。在生物科技研發(fā)領(lǐng)域,ROS的模塊化架構(gòu)和通信機(jī)制能夠有效支持實(shí)驗(yàn)室自動(dòng)化、生物傳感數(shù)據(jù)處理和智能實(shí)驗(yàn)設(shè)備控制等應(yīng)用。
節(jié)點(diǎn)(Node)是ROS中的基本執(zhí)行單元,每個(gè)節(jié)點(diǎn)負(fù)責(zé)完成一個(gè)特定的功能,例如傳感器數(shù)據(jù)采集、運(yùn)動(dòng)控制或算法計(jì)算。在生物科技研發(fā)中,節(jié)點(diǎn)可以代表不同的實(shí)驗(yàn)設(shè)備模塊,如溫度控制器、液體處理系統(tǒng)或顯微鏡成像單元。
節(jié)點(diǎn)管理器(ROS Master)負(fù)責(zé)協(xié)調(diào)所有節(jié)點(diǎn)之間的通信,提供服務(wù)注冊(cè)、查找和消息路由。它確保了分布式系統(tǒng)中的節(jié)點(diǎn)能夠高效協(xié)作。在生物實(shí)驗(yàn)室中,節(jié)點(diǎn)管理器可以統(tǒng)一管理多個(gè)實(shí)驗(yàn)設(shè)備節(jié)點(diǎn),確保數(shù)據(jù)流和控制命令的同步。
話題(Topic)是節(jié)點(diǎn)間異步通信的機(jī)制,節(jié)點(diǎn)通過發(fā)布和訂閱話題來交換數(shù)據(jù)。例如,在生物反應(yīng)器監(jiān)控系統(tǒng)中,一個(gè)節(jié)點(diǎn)可以發(fā)布溫度數(shù)據(jù)話題,而另一個(gè)節(jié)點(diǎn)訂閱該話題以進(jìn)行實(shí)時(shí)分析和記錄。
消息(Message)是話題中傳輸?shù)臄?shù)據(jù)結(jié)構(gòu),定義了數(shù)據(jù)的類型和格式。在生物科技應(yīng)用中,消息可以包含實(shí)驗(yàn)參數(shù)、傳感器讀數(shù)或圖像數(shù)據(jù),例如基因序列信息或細(xì)胞培養(yǎng)環(huán)境數(shù)據(jù)。
服務(wù)(Service)提供同步的請(qǐng)求-響應(yīng)通信模式,適用于需要即時(shí)反饋的操作。在生物研發(fā)中,服務(wù)可用于控制設(shè)備執(zhí)行特定任務(wù),如啟動(dòng)離心機(jī)或查詢實(shí)驗(yàn)狀態(tài)。
參數(shù)(Parameter)用于存儲(chǔ)配置數(shù)據(jù),可以在運(yùn)行時(shí)動(dòng)態(tài)調(diào)整。例如,在生物實(shí)驗(yàn)自動(dòng)化中,參數(shù)可以定義培養(yǎng)溫度、pH值閾值或?qū)嶒?yàn)持續(xù)時(shí)間,方便研究人員靈活修改。
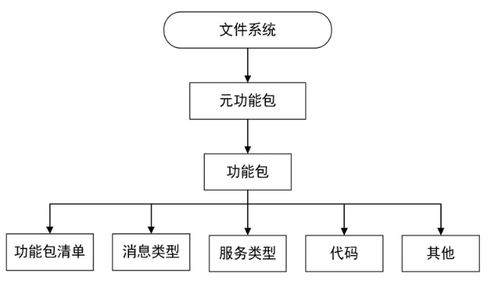
功能包(Package)是ROS軟件的基本組織單元,包含節(jié)點(diǎn)、消息、服務(wù)和其他資源。在生物科技領(lǐng)域,功能包可以封裝特定實(shí)驗(yàn)流程的代碼,如DNA測(cè)序分析或藥物篩選算法,促進(jìn)代碼復(fù)用和團(tuán)隊(duì)協(xié)作。
ROS的核心概念為生物科技研發(fā)提供了高效的軟件框架,通過模塊化設(shè)計(jì)和強(qiáng)大的通信機(jī)制,支持復(fù)雜實(shí)驗(yàn)系統(tǒng)的集成與自動(dòng)化,加速了生物技術(shù)創(chuàng)新和產(chǎn)業(yè)化進(jìn)程。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://m.mantv.cn/product/36.html
更新時(shí)間:2026-06-07 04:53:15









